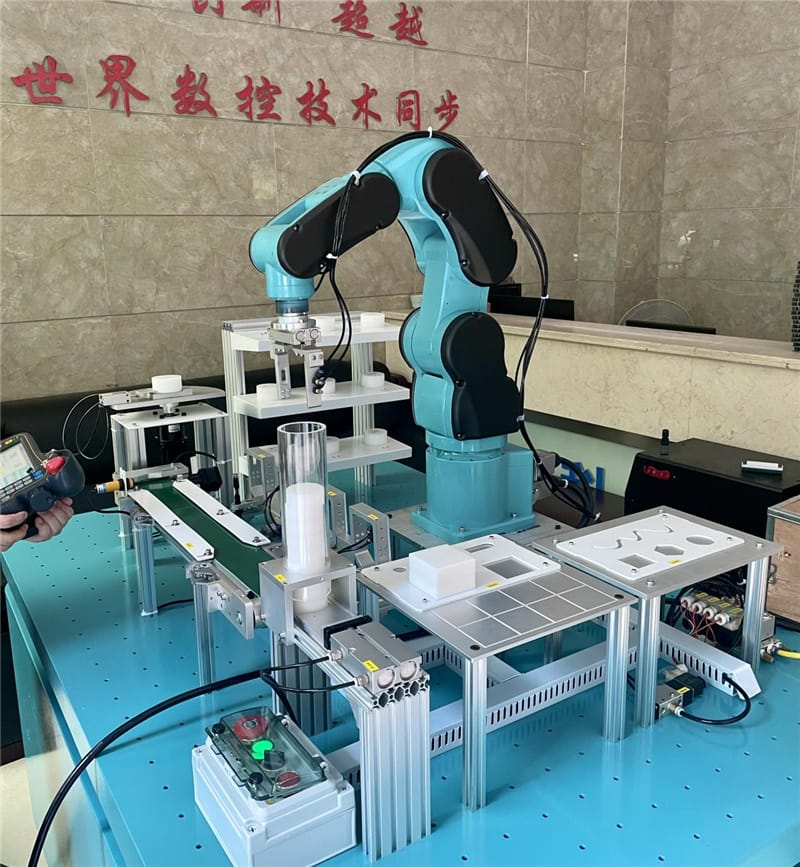
د شپږ محور ویلډینګ روبوټ بازو کنټرولر
د محصول ځانګړتیا
۱. هیڅکله ماشین مه ماتوئ، سیسټم د یادګاري فعالیت سره (د ابوسولیوټ ځانګړتیا)
۲. په دې ۴-۸ ګډ محور ویلډینګ روبوټ کنټرولر کې د سخت حد نصبولو ته اړتیا نشته او ټول کټ صفر نقطې ته بیرته ځي (د ابوسولیوټ ځانګړتیا)
۳. د وای فای فعالیت له لارې د کنټرولر سره د تلیفون اړیکه وکاروئ، د پروګرام لیږلو لپاره اسانه او ډیر اسانه (د نیوکر ځانګړتیا)
۴. د G کوډ پروګرام، یوازې د نیوکر-CNC روبوټ کنټرولر کولی شي د G کوډ پروګرام لکه cnc کنټرولر سره کار وکړي (نیوکر ځانګړتیا)
۵. د تخنیکي پیرامیټر سره فعالیت تدریس کړئ، چې کار کول یې اسانه دي (د نیوکر ځانګړتیا)
۶. PLC او میکرو پروګرام ټول خلاص شوي (د نیوکر ځانګړتیا)
۷. د کنټرولر څخه یوازې یو کیبل راوځي، چې نښلول یې اسانه دي (د بس ډول ځانګړتیا)
۸. د څو سطحو تصادفي پټنوم ساتنه، ډیر خوندیتوب (د نیوکر ځانګړتیا)
د پیرامیټر توضیحات (د G کوډ ښیې)
1.د کنټرولر شافټ شمېر:د صنعتي اتوماتیک موټومن آرک ویلډینګ روبوټ 4-8 محور کنټرول پینل (j1,j2,j3,j4,j5,j6)
2. ډول: د بس مطلق ډول او سرو ډول
۳. تر ټولو زیات پروګرام کوونکی: ±۹۹۹۹۹.۹۹۹
۴. د موټرو کوډ کوونکی: ۱۷ بټونه او ۲۳ بټونه
۵. د I/O ټکي: ۴۸*۳۲ I/O
۶. ۰-۱۰V انلاګ: ۲ لارې ۰-۱۰V انلاګ
۷. عملیات: تدریس، ریپلی، ریموټ
۸. د وائی فای فعالیت: د پروګرام لیږلو لپاره د تلیفون سره وصل شئ
۹. د RS ۲۳۲ فعالیت: RS۲۳۲ د کمپیوټر سره د نښلولو لپاره
۱۰. د USB فعالیت: پروګرام تازه او واستوئ
۱۱. د پروګرام حالت: تدریس، د G کوډ، تخنیک پیرامیټر
۱۲. د حرکت فعالیت: نقطې ته نقطې، مستقیمه کرښه، قوس
۱۳. لارښوونې: حرکت، منطق، محاسبه، تخنیکونه، په CNC کې د G کوډ
۱۴. د همغږۍ سیسټم: ګډ، کارونکی، وسیله، نړۍ
۱۵. د PLC فعالیت: زینه، ۸۰۰۰ ګامونه سم کړئ
۱۶. د الارم معلومات: بیړني حالت، چلول، ساتنه، د پیل کولو آرک او همغږۍ تېروتنه
۱۷. د محدودیت فعالیت: نرم حد
۱۸. د کنټرولر الګوریتم:
۱) عمودی څو ګډ سریال ټوبوټ؛
عمودی متوازی ګرام روبوټ؛
۳) عمودی څو ګډ L شکل د مړوند روبوټ؛
۴) د قطب همغږي روبوټ؛
۵) سکارا روبوټ؛
۶) ډیلټا روبوټ؛
۷) ځانګړی روبوټ؛
۱۹. د پټنوم ساتنه: د څو کچې تصادفي پټنوم ساتنه
۲۰. د کارونکي میکرو پروګرام: لري
۲۱. د بریښنایی ګیر فعالیت: لري
۲۲. کاریال: ویلډینګ، پالیټیز کول، رنګ کول، ټینډینګ، لیزر پرې کول او نور ځانګړي روبور بازو
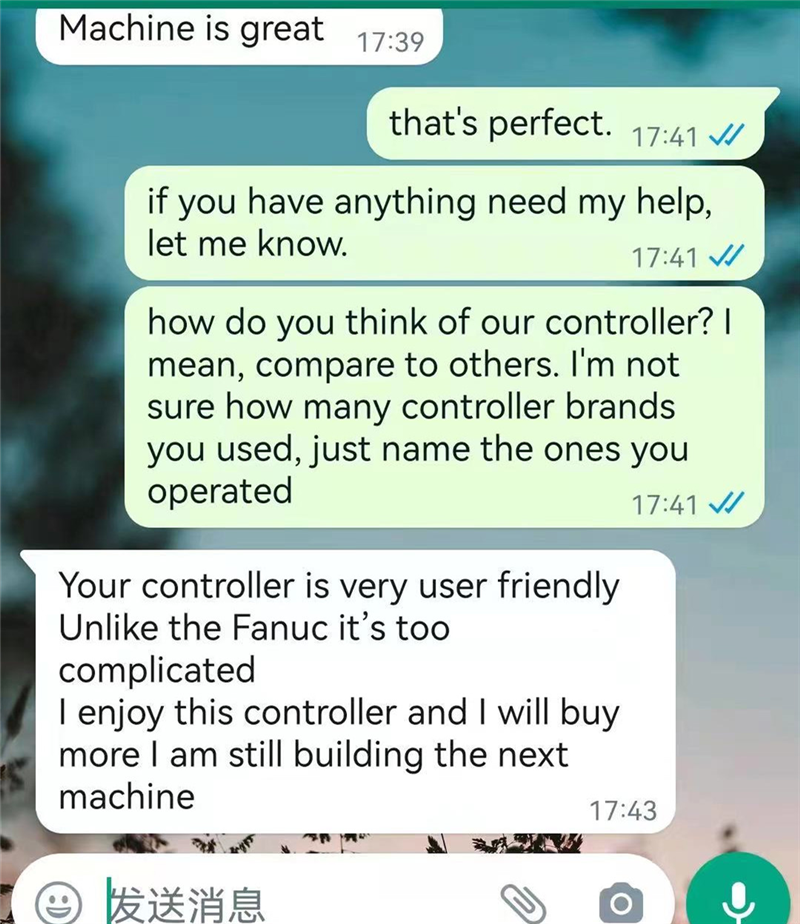
د پیرودونکو ستاینه
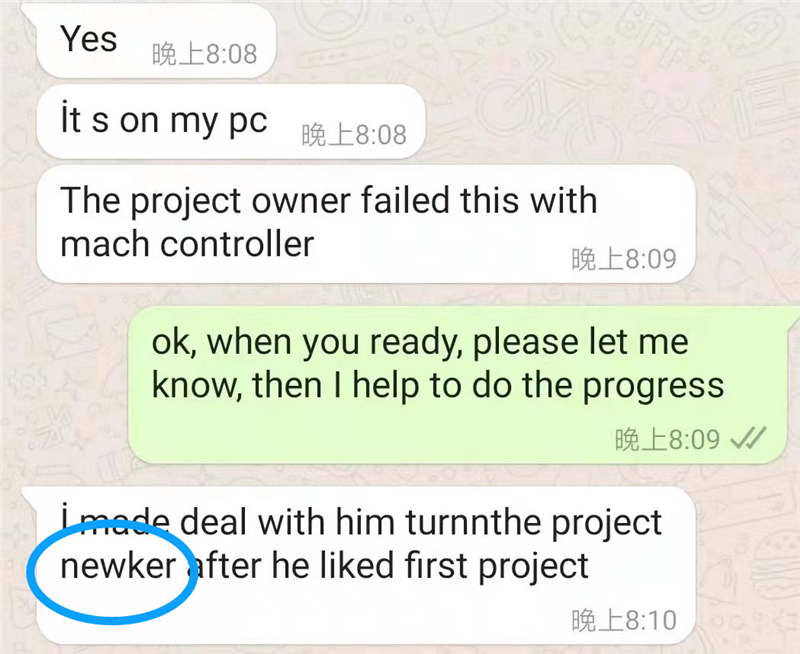

د پیرودونکي قضیه